





Los fabricantes de automóviles se han visto atrapados en la crisis de la escasez de componentes electrónicos, aunque la tendencia de los automóviles inteligentes es irresistible. Como la evidencia más instantánea e impresionante de inteligencia para los usuarios, el sistema PEPS (Passive Entry and Passive Start) ya no es una característica de alto perfil solo para autos de alta gama. Muchos fabricantes de automóviles, en particular marcas emergentes, lo han introducido en modelos de nivel medio o incluso económicos. En el mercado de China, donde las ventas de vehículos eléctricos registran un crecimiento de más del 100 por ciento en la primera mitad de 2022, los principales fabricantes de automóviles eléctricos como BYD, GAC Aion, Geely, Nio, Xpeng y Li Auto básicamente han equipado todos los modelos con PEPS .

Si bien esa ECU nos aturde silenciosamente a los automovilistas, ¿alguna vez hemos pensado en investigar el rastro de su fabricación y la perspectiva de su futuro? Salgamos a la carretera.
PEPS brinda a los automovilistas la experiencia de ingresar al automóvil de manera segura sin desbloquear manualmente la actividad. El motor y el sistema HVAC del automóvil se pueden encender de forma remota antes de que el conductor o los pasajeros ingresen al automóvil. Mientras todos los pasajeros abandonan el automóvil, el PEPS bloqueará automáticamente el automóvil. De esta forma, los usuarios de automóviles disfrutan de la comodidad de la entrada pasiva con seguridad garantizada. Debe ser por eso que lo nombramos con la palabra “pasivo”.
Ayer: RKE y PKE
Actualmente, las principales soluciones PEPS integran tecnologías inalámbricas como Bluetooth Low Energy (BLE), NFC, RFID (alta frecuencia y baja frecuencia), etc. Bueno, ¿cómo funcionan? Sería difícil de digerir si contamos la historia a partir de hoy. Entonces, ¿por qué no volvemos al pasado?
A fines de la década de 1990, algunos modelos de automóviles de alta gama incorporaron un sistema de entrada remota sin llave (RKE), una evolución con respecto a la solución anterior IMMO (inmovilizador) basada en RFID de baja frecuencia (125 KHz). Como predecesor del PEPS, el RKE tiene el llavero para transmitir señales UHF (frecuencia ultra alta) a un receptor de RF conectado con el BCM (módulo de control de la carrocería) del automóvil para verificar la identidad del usuario. Una vez que se verifique la ID, el sistema ejecutará una acción de apertura/cierre de puerta impulsada por el BCM. Tal mecanismo de verificación unidireccional, como se muestra en la Figura 1, puede interpretarse como un sistema de cifrado avanzado en una película de espías. Cuando un agente secreto visitante llega a un lugar de reunión, tiene que hablar o mostrar dicho código. Si el cifrado es correcto, se le permitirá entrar. El inconveniente de este mecanismo es que una vez que el enemigo se infiltró y obtuvo el cifrado,
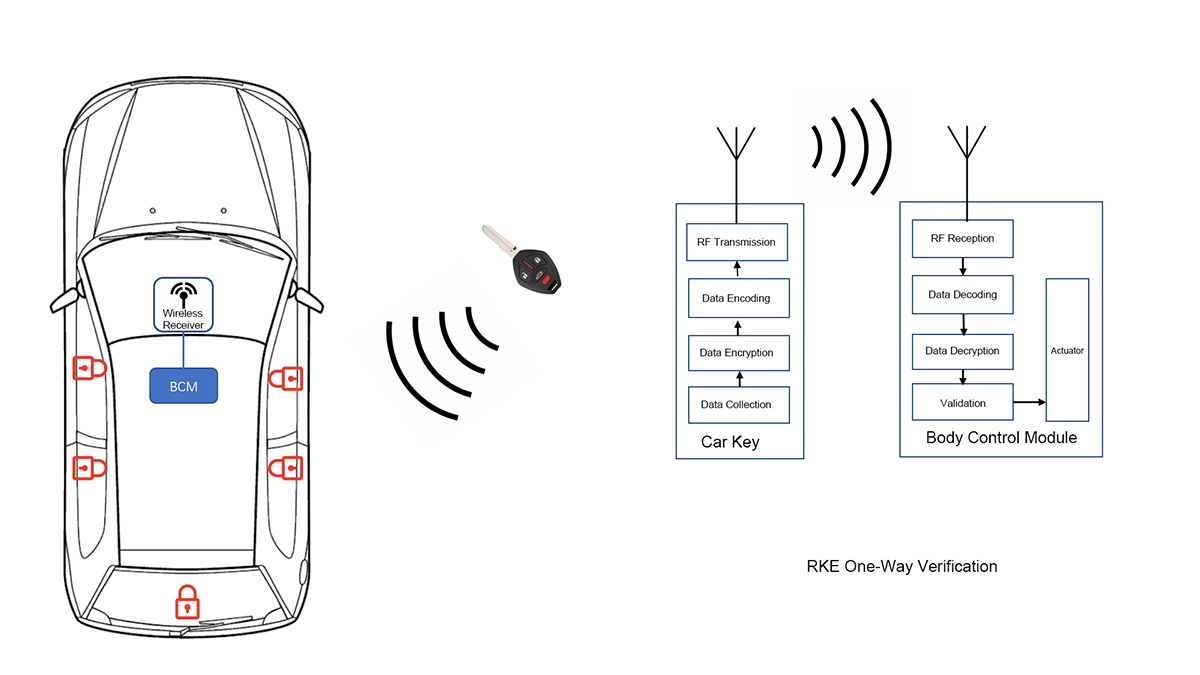
Figura 1. Mecanismo de trabajo de RKE
La solución RKE adopta bandas de frecuencia de 315 MHz (en EE. UU., China y Japón, etc.), 433,92 MHz (en Europa, China) y 868 MHz (en Europa). En términos de modulación de señal, la mayoría de los países adoptan ASK (modulación por cambio de amplitud). ), mientras que Japón adopta el modo FSK (modulación por cambio de frecuencia). Los proveedores de circuitos integrados como Silicon Labs, Maxim, Microchip y NXP, etc. tienen ofertas en este campo.
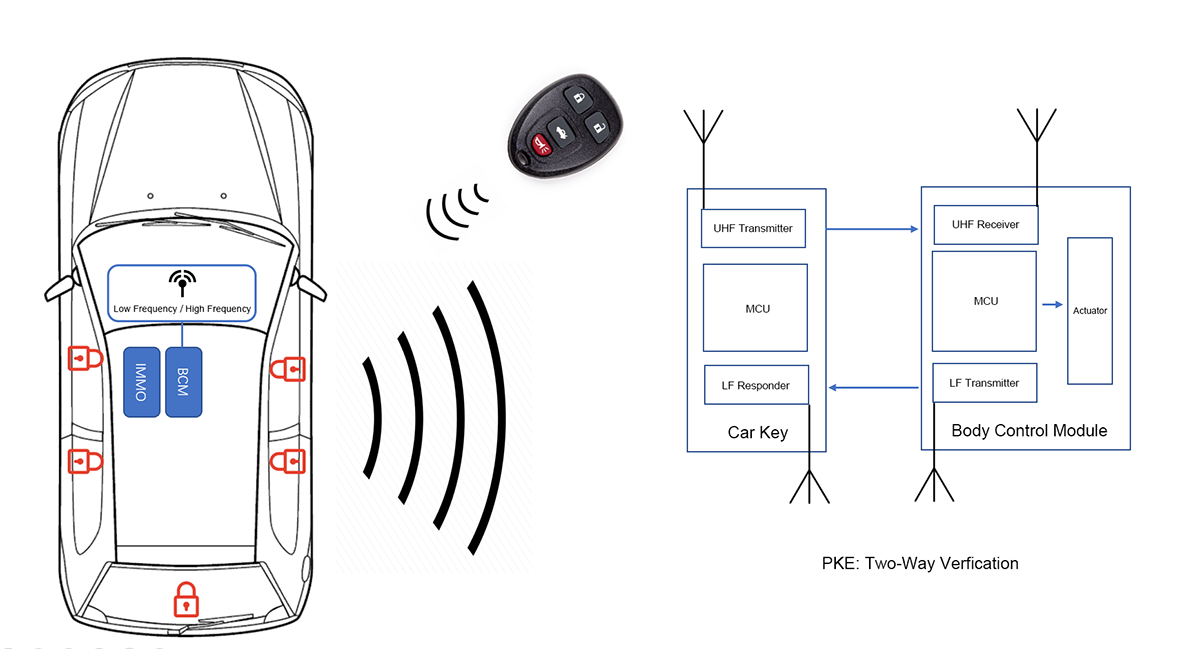
Figura 2. Mecanismo de trabajo de PKE
Hoy: Bluetooth PEPS es la corriente principal
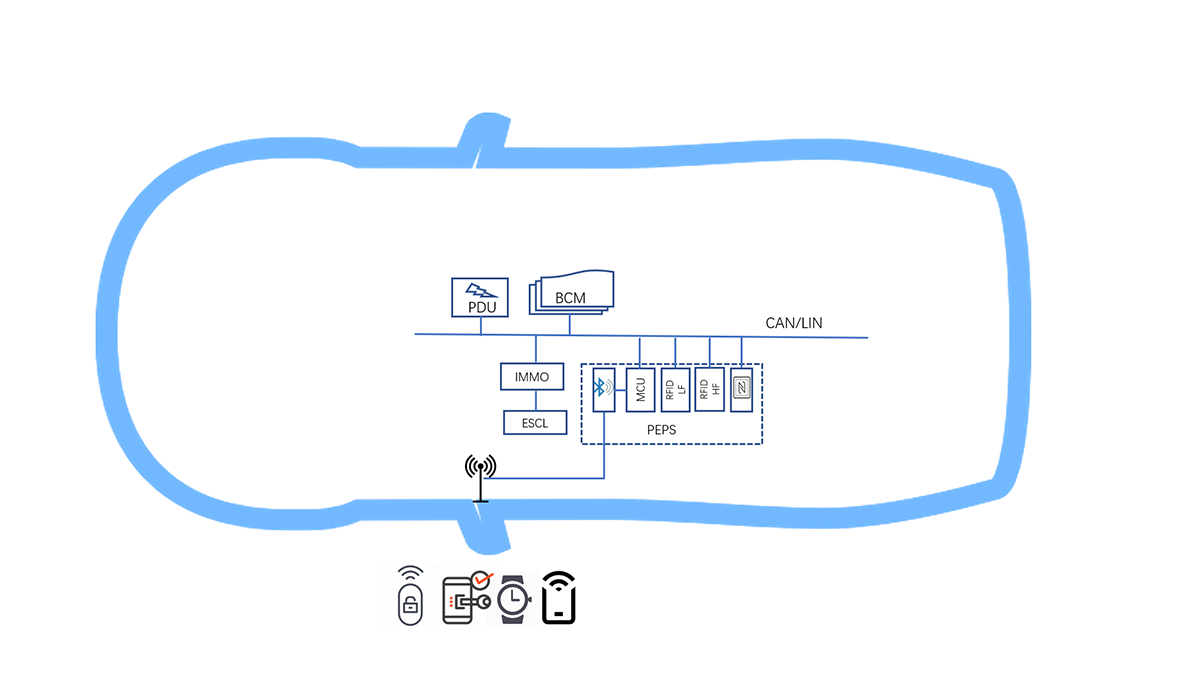
Figura 3. Esquema PEPS de Bluetooth de nivel de entrada (RSSI Single Station)
Tecnología AOA para realizar PEPS convencionales
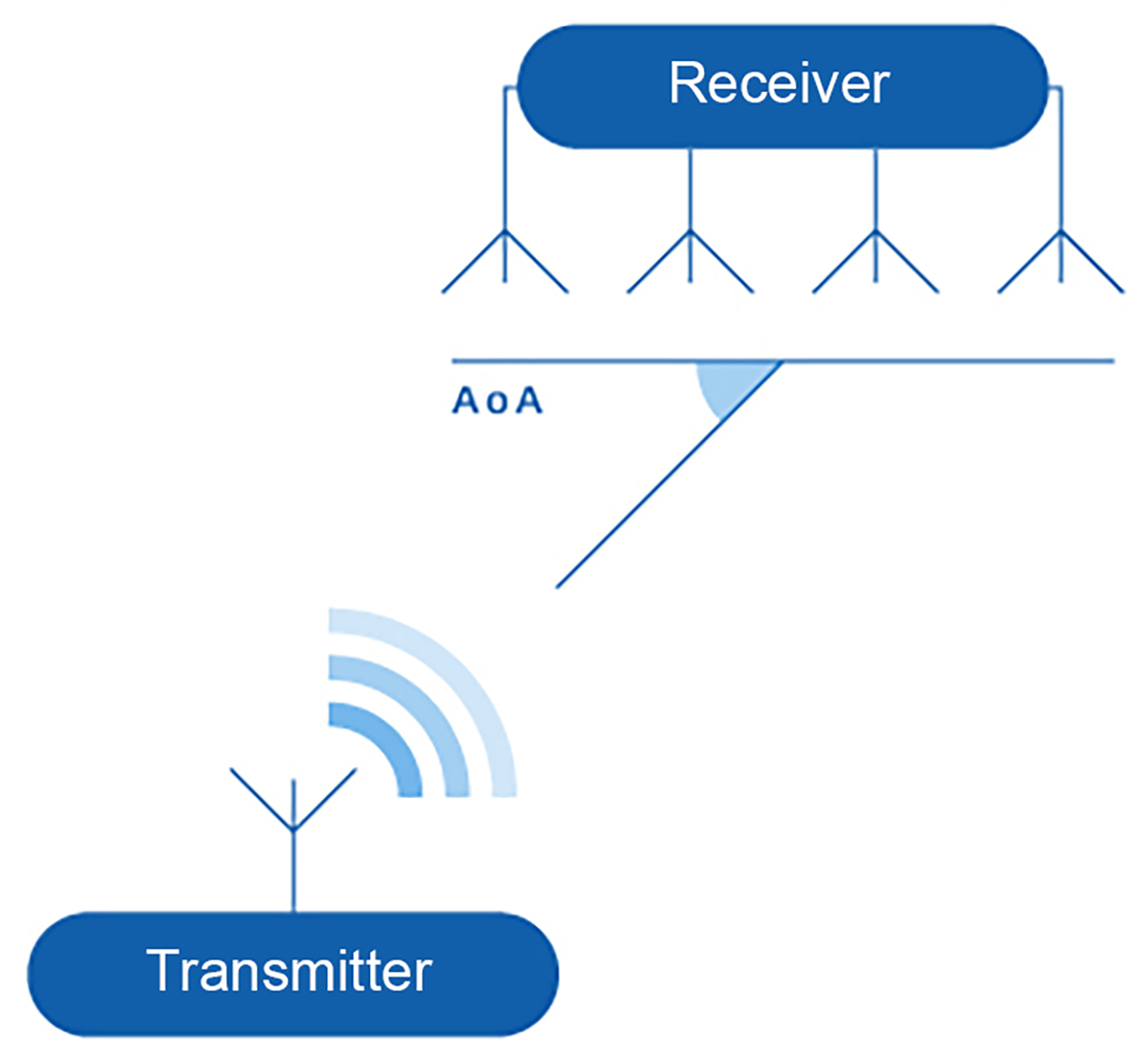
Figura 4. Posicionamiento de Bluetooth AOA
Obviamente, para mejorar el nivel de precisión del posicionamiento, necesitamos soporte de múltiples estaciones base Bluetooth con algoritmo AoA. Por lo tanto, en los modelos de nivel medio, los fabricantes de automóviles eligen implementar PEPS de Bluetooth multipunto, como se ilustra en la Figura 5, sin embargo, la cantidad exacta de estaciones base y el patrón de diseño varían en cierta medida para los diferentes modelos de automóviles.
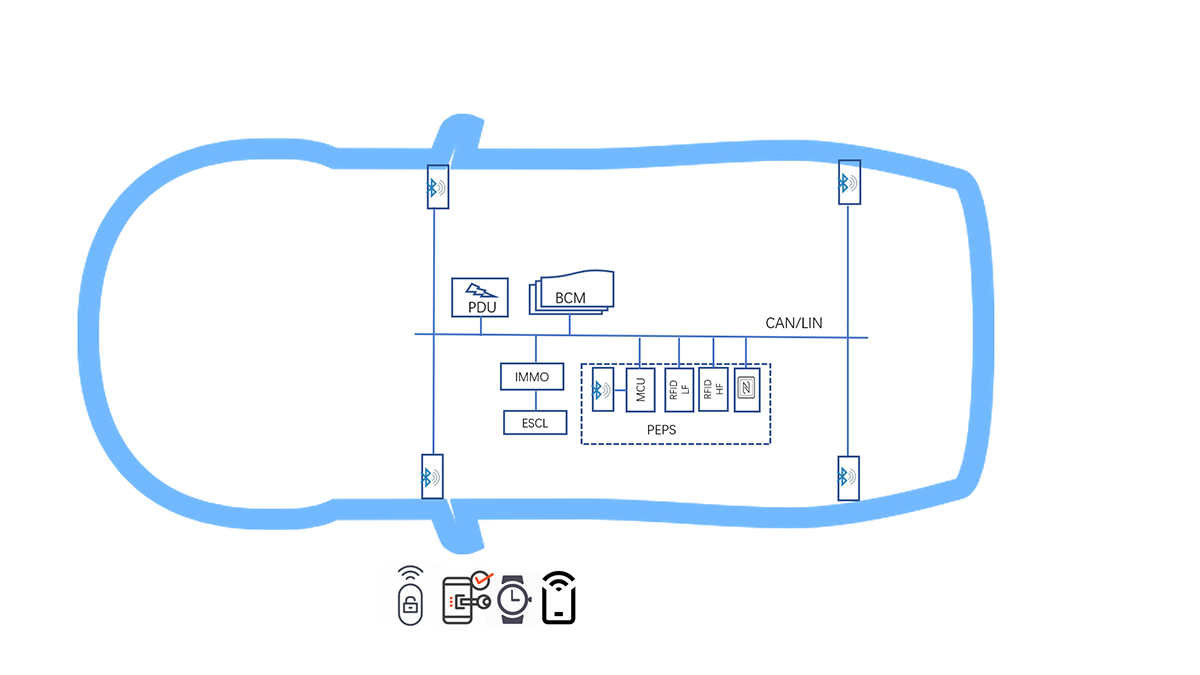
Figura 5. Solución PEPS de Bluetooth estándar (posicionamiento AoA)
Los SoC más adoptados en el campo de Bluetooth PEPS incluyen TI CC2640, Silicon Labs EFR32BG22 y NXP KW36, etc.
Tomorrow: UWB is Promising
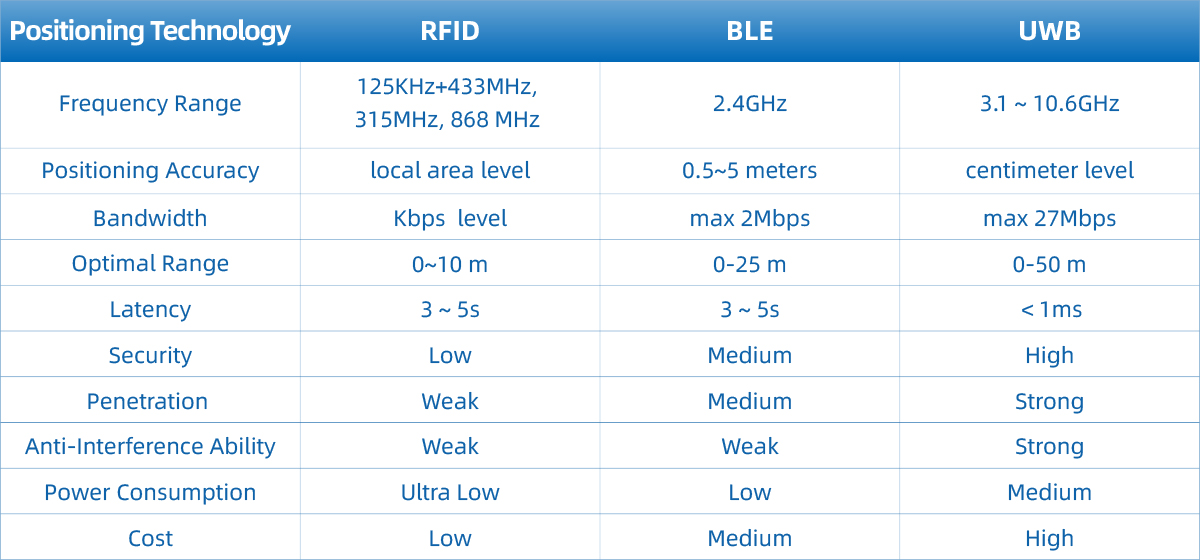
Tabla 1. Comparación de tecnologías de posicionamiento PEPS
Algoritmos de posicionamiento para UWB
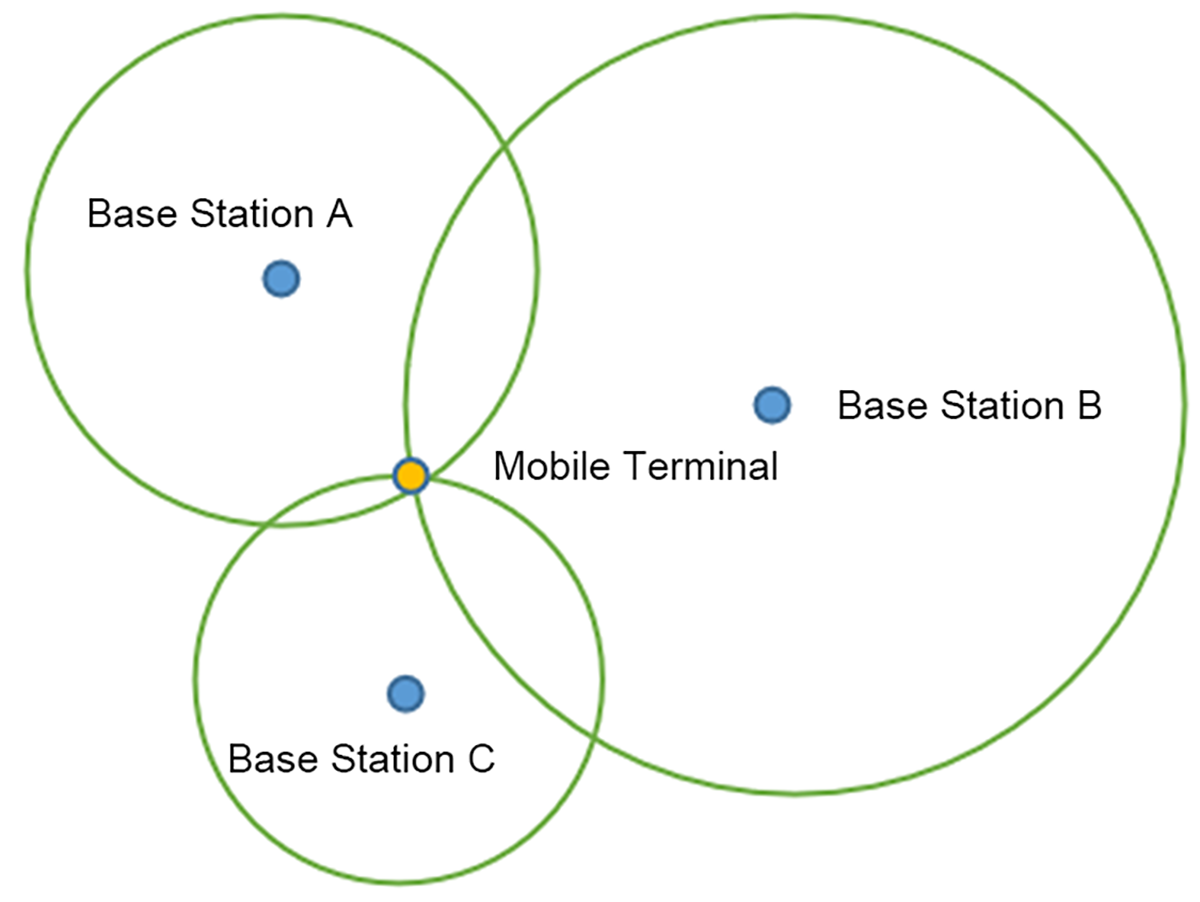
Figura 6. Algoritmo de posicionamiento TOA (Método de posicionamiento circular)
Una mejora sobre TOA, TDOA realiza una sincronización precisa entre las estaciones base, lo cual es fácil de realizar. No se trata de sincronización de tiempo entre el terminal móvil y las estaciones base, como se muestra en la Figura 7. Primero calcule la diferencia de distancia entre el terminal móvil y la estación base A y entre este y la estación base B. El terminal móvil debe estar en una hipérbola con la estación base A y la estación base B como focos. Se puede obtener otro conjunto de hipérbolas mediante las diferencias de distancia entre el terminal móvil y la estación base A y la estación base C, y la intersección de las hipérbolas es la posición del terminal móvil. En el rango de espacio del vehículo, la influencia de trayectos múltiples, ruido, etc. también se puede reducir por medio de la diferencia de distancia.
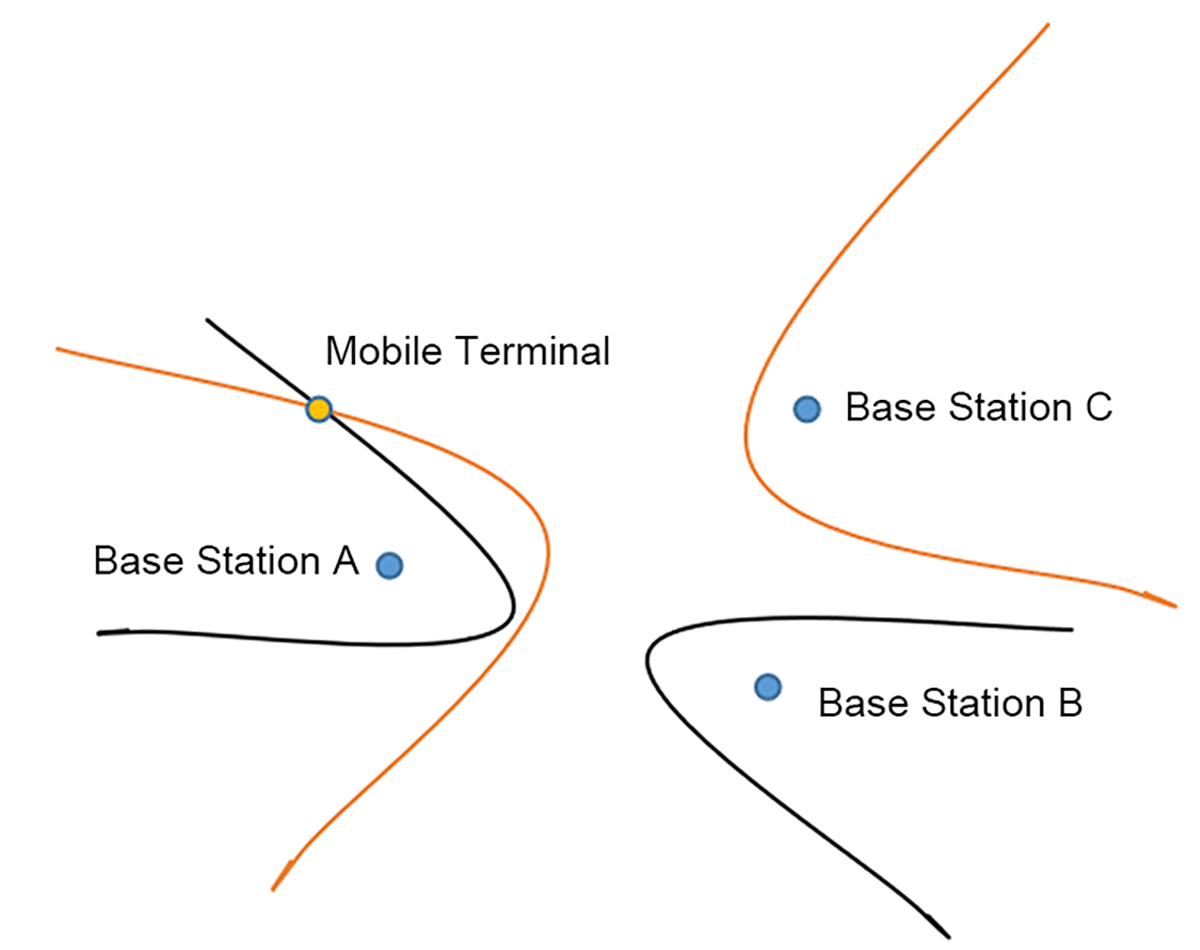
Figura 7 Algoritmo de posicionamiento TDOA
El posicionamiento AOA calcula el ángulo de llegada según el principio de diferencia de fase y solo necesita dos estaciones base para lograr el posicionamiento. Debido a la cuestión de la resolución angular, la precisión de posicionamiento disminuye con el aumento de la distancia desde la estación base, y se utiliza principalmente para posicionamiento en distancias cortas y medias.
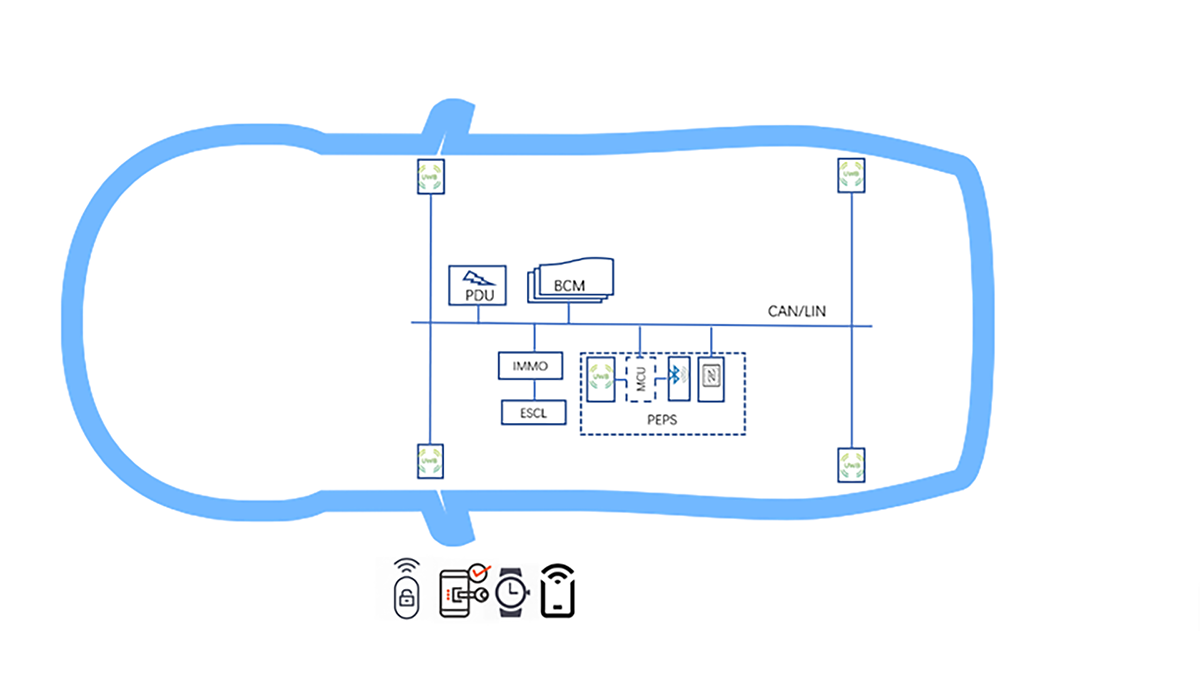
Figura 8. Arquitectura de implementación de UWB PEPS especificada por CCC 3.0
En el campo de los chips UWB, los fabricantes maduros actualmente reconocidos son Apple, NXP Trimension y QORVO Decawave. Entre sus circuitos integrados lanzados, solo NXP Trimension NCJ29D5 cumple con los requisitos de las reglamentaciones de vehículos.
Extensión: Bio-Radar
La experiencia de UWB PEPS para conductores es íntima y segura. Sin embargo, ¿los pasajeros del coche sienten lo mismo? Normalmente sí, pero no en algunos casos especiales. A veces es duro para ellos. Por ejemplo, si el conductor sale del coche, las puertas se bloquean automáticamente. Un bebé o una mascota dulce se dejó accidentalmente en el automóvil. ¿Debe el automóvil enviar una alarma al conductor? ¡Absolutamente necesario! Afortunadamente, UWB puede abordarlo bien.
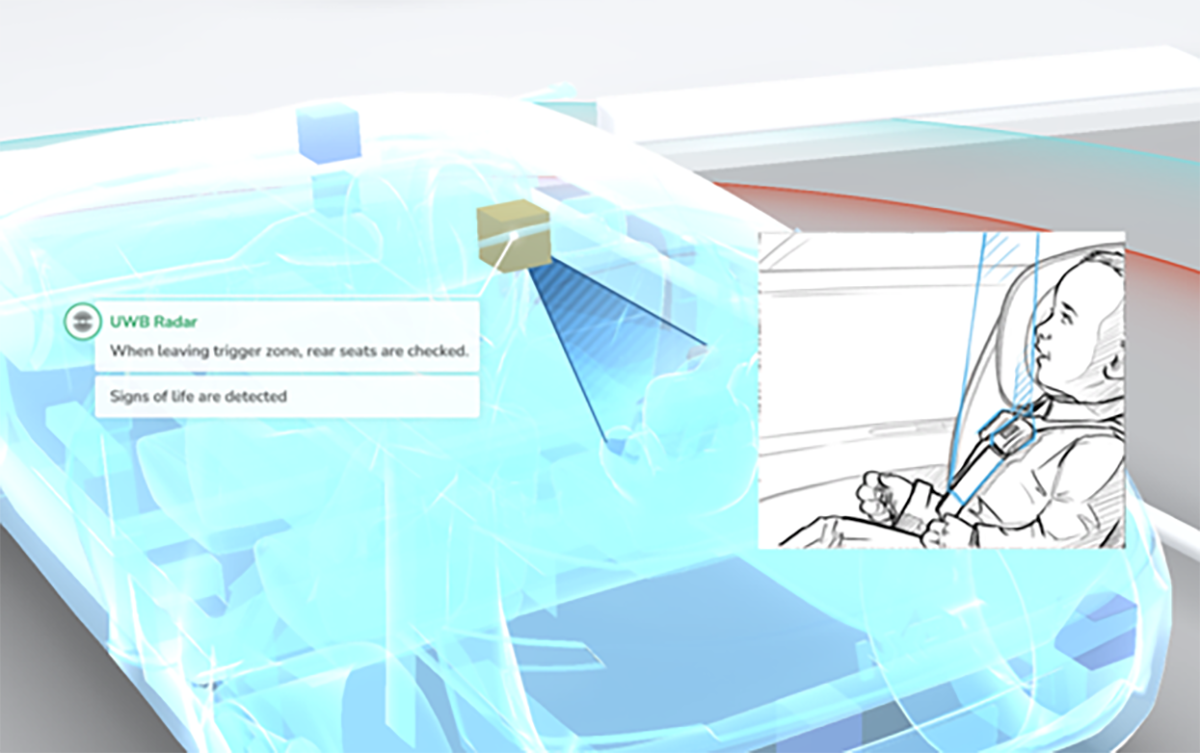
Figura 9. Detección de vida con UWB Bio-Radar
Tronco: Kick-to-Open
Además de la detección de vida en el vehículo, basada en la función de percepción de movimiento del radar UWB, UWB también tiene una aplicación inteligente de pisotear para abrir el maletero. Cuando la identidad del conductor llega a la parte trasera del vehículo, el radar UWB puede detectar con precisión la acción de pisotear, abriendo así automáticamente la cajuela del vehículo.
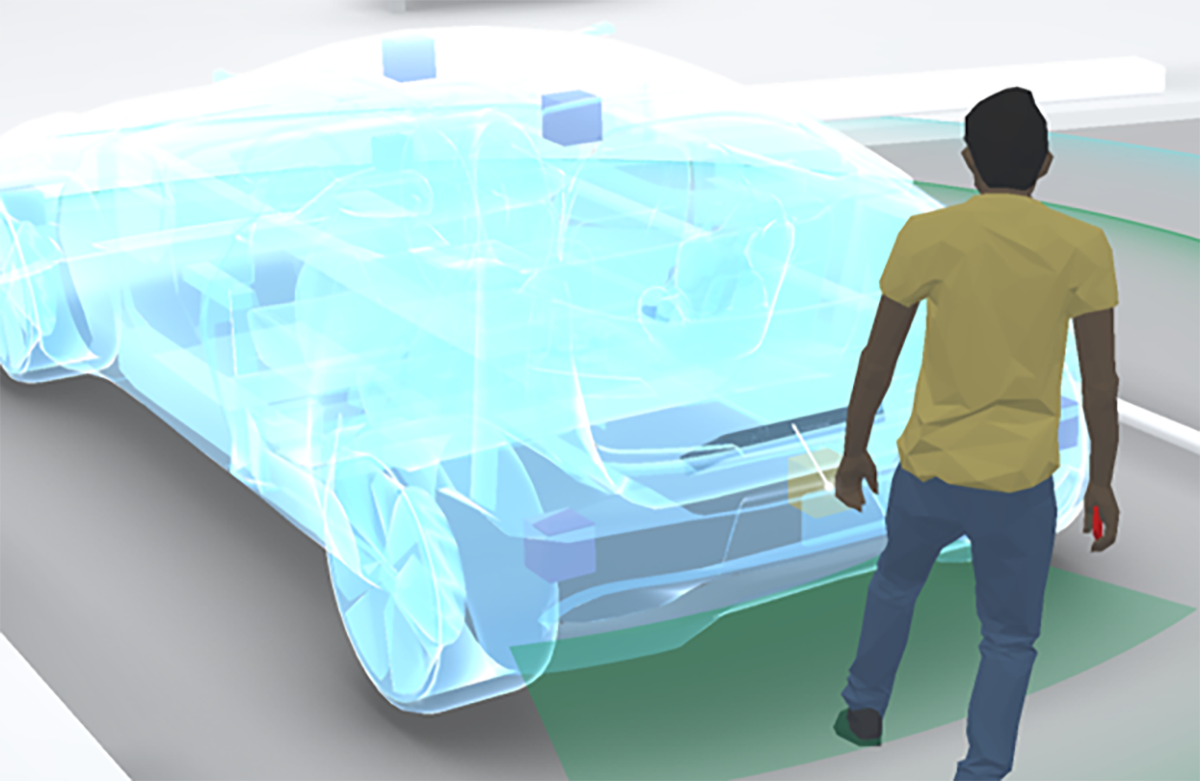
Figura 10. UWB permite la solución Kick-to-Open
Las dos funciones de radar UWB descritas anteriormente, incluido el bio-radar UWB y el radar kicking UWB, no requieren hardware adicional, sino que solo se implementan mediante la reutilización del hardware UWB del lado del vehículo sin agregar costos de hardware adicionales. También podemos considerarlos como parte de la futura funcionalidad UWB PEPS.
Servicio de aparcacoches automatizado habilitado para UWB
AVP (Automated Valet Parking) es la función de valet parking autónomo. Se conoce como la tecnología de conducción autónoma de nivel L4 que brinda a los usuarios "libertad de última milla". Actualmente es el escenario de aplicación de conducción autónoma más prometedor para la comercialización, como se muestra en la Figura 11. Otro gran beneficio de implementar una experiencia PEPS con UWB es que proporciona las condiciones necesarias y suficientes para implementar AVP en el costado del automóvil.
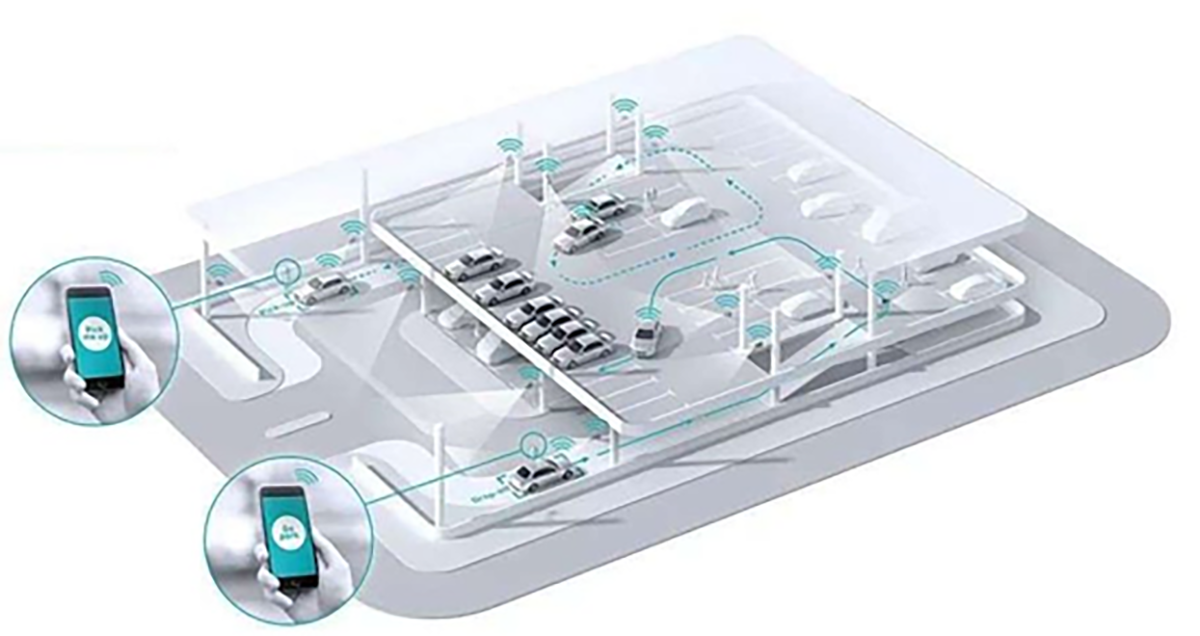
Figura 11 Sistema de estacionamiento con valet automático
La figura 12 muestra un esquema de diseño de nodo UWB de extremo de vehículo factible. Se colocan un total de cuatro nodos UWB PEPS en los faros delanteros y traseros, y un quinto nodo UWB PEPS+AVP se coloca en el techo. El quinto nodo puede recibir tanto la señal UWB en el automóvil como la señal UWB fuera del automóvil, y también es el nodo clave para realizar la función AVP.
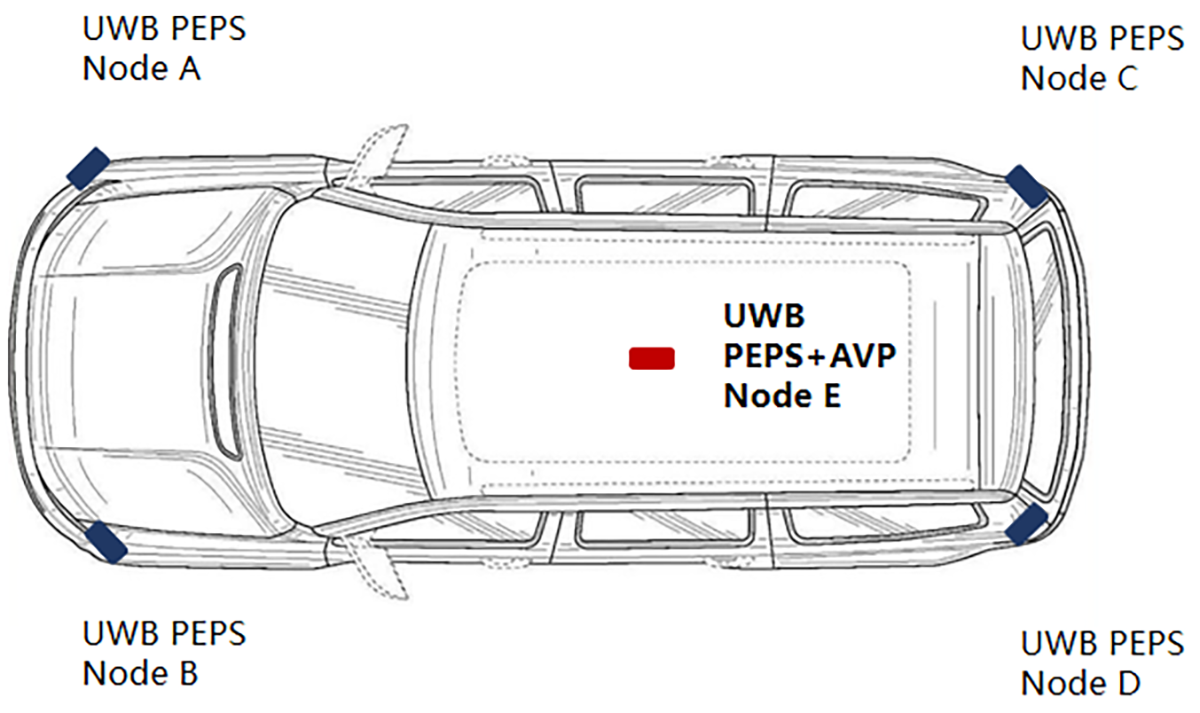
Figura 12 Arquitectura de PEPS + AVP
En el modo PEPS, el quinto nodo UWB coopera con los otros cuatro nodos UWB para completar la medición de la posición de la llave inteligente y envía la información de rango al controlador de dominio del cuerpo (BCM) para completar el cálculo de la posición de la llave inteligente. clave, para decidir el seguimiento de las operaciones de desbloqueo e inicio.
Conclusión
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
Tel : +86 (0)28-86925399
Correo electrónico : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785














